|
Jafar
|
|
Jafar
|
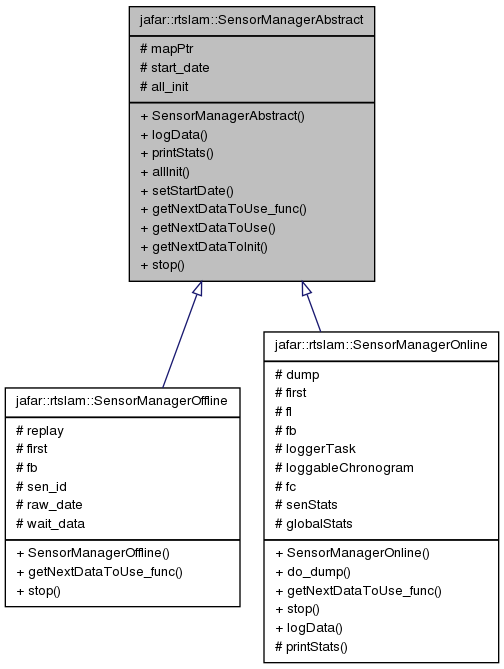
Base class for sensors managers, that decide which data of which sensor should be integrated in the filter next. More...
Base class for sensors managers, that decide which data of which sensor should be integrated in the filter next.
The goal is to avoid that a sensor be "starved" (never used) because it has large latencies and always arrives too late, once the filter has already moved after. In order to do that it can use a prediction of the timestamp and arrival time of the next data.
The general problem to solve is to chose which updates to do and when, in order to maximize the gain of information with the constraints of real time computations and chronological updates in filter.
Definition at line 39 of file sensorManager.hpp.
#include <sensorManager.hpp>
Classes | |
| struct | ProcessInfo |
Public Member Functions | |
| SensorManagerAbstract (map_ptr_t mapPtr) | |
| virtual void | logData (sensor_ptr_t sen, double start_date, double waitedmove_date, double moved_date, double processed_date) |
| virtual void | printStats () |
| bool | allInit () |
| void | setStartDate (double start_date) |
| virtual ProcessInfo | getNextDataToUse_func (double currentTime)=0 |
| ProcessInfo | getNextDataToUse (double currentTime) |
| int | getNextDataToInit (ProcessInfo &result) |
| virtual void | stop () |
Protected Attributes | |
| map_ptr_t | mapPtr |
| double | start_date |
| bool | all_init |
| int jafar::rtslam::SensorManagerAbstract::getNextDataToInit | ( | ProcessInfo & | result | ) | [inline] |
Definition at line 88 of file sensorManager.hpp.
| Generated on Wed Oct 15 2014 00:37:46 for Jafar by doxygen 1.7.6.1 |

|

