|
Jafar
|
|
Jafar
|
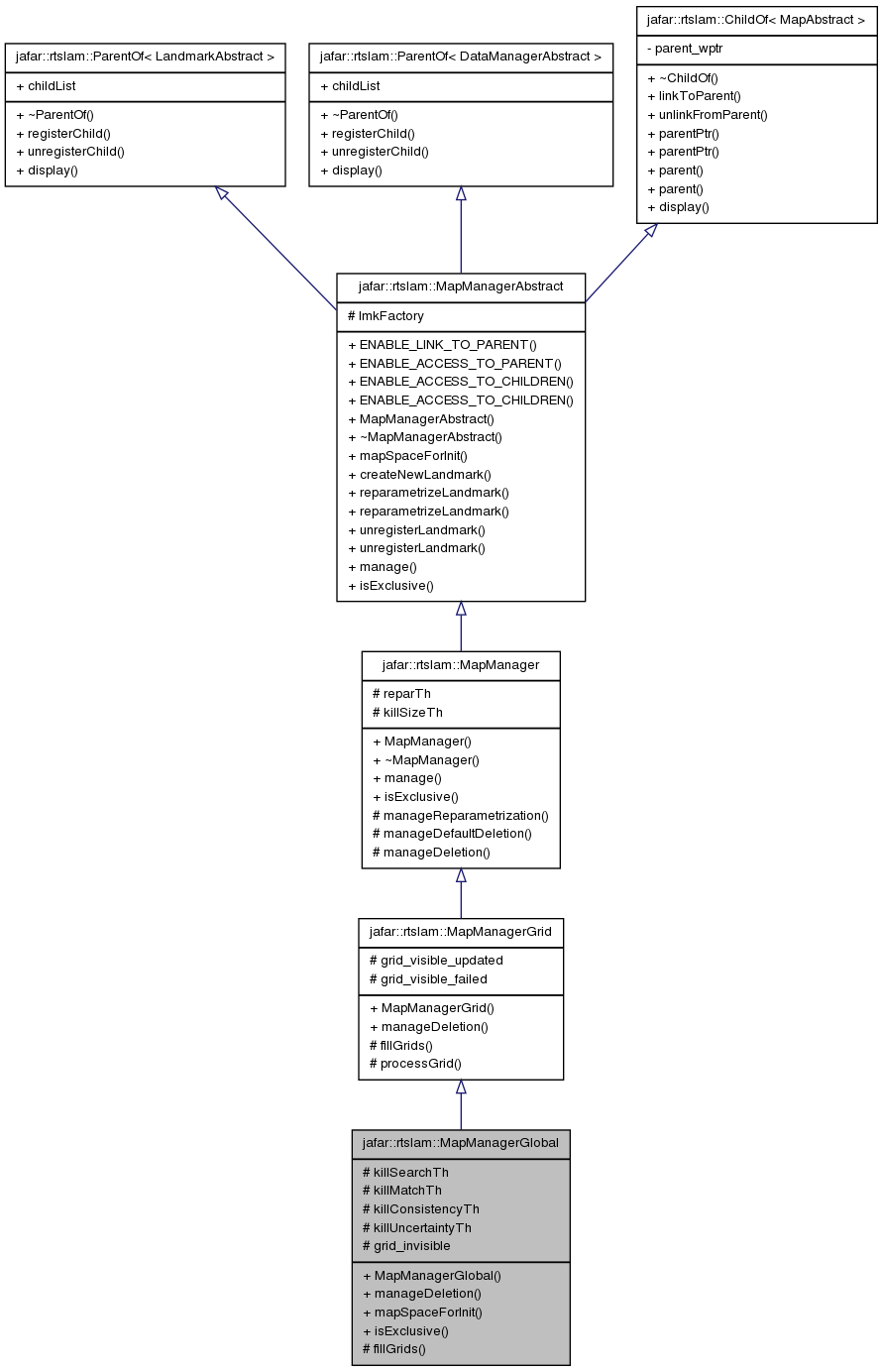
Map manager made for doing slam as long as possible while optimizing the use of the map. More...
Map manager made for doing slam as long as possible while optimizing the use of the map.
When the map is full, lower quality and spatially redundant landmarks are removed to make room for new landmarks. Kill if:
Definition at line 179 of file mapManager.hpp.
#include <mapManager.hpp>
Public Member Functions | |
| MapManagerGlobal (landmark_factory_ptr_t lmkFactory, double reparTh, double killSizeTh, double killSearchTh, double killMatchTh, double killConsistencyTh, double killUncertaintyTh, double gridAngularRes, double gridDistInit, double gridDistFactor, int gridNDist, double gridPhiFactor) | |
| virtual void | manageDeletion () |
| virtual bool | mapSpaceForInit () |
| Does map has enough space to init a new landmark ? | |
| virtual bool | isExclusive (observation_ptr_t obsPtr) |
| Returns if the given observation must be exclusive in the FeatureManager (ie we believe there are good chances to find it again very soon), or if new landmarks can be initialized ignoring this observation (ie we believe there is little chance to find it again very soon) | |
Protected Member Functions | |
| void | fillGrids (bool fill_visible) |
Protected Attributes | |
| double | killSearchTh |
| minimum number of times the landmark must have been searched to be deleted for match or consistency reasons | |
| double | killMatchTh |
| ratio match/search threshold | |
| double | killConsistencyTh |
| ratio consistency/search threshold | |
| double | killUncertaintyTh |
| ratio uncertainty/dist threshold | |
|
SphericalGrid < MapManagerGrid::Cell > | grid_invisible |
| Generated on Wed Oct 15 2014 00:37:45 for Jafar by doxygen 1.7.6.1 |

|

