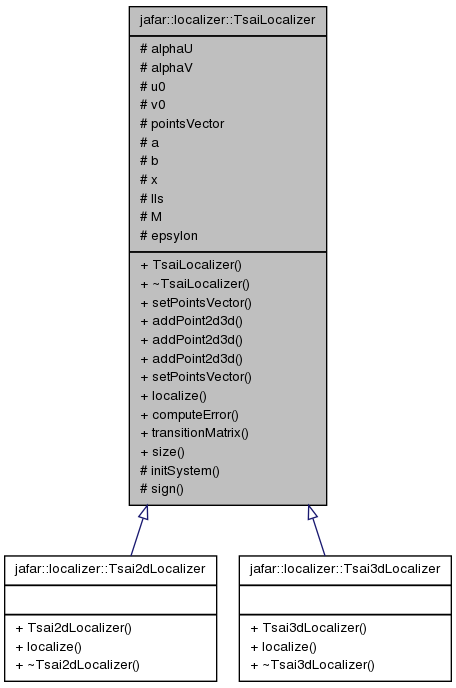
Class TsaiLocalizer, mother class for Tasai2dLocalizer and Tsai3dLocalizer It's a reimplementation in jafar of calife TSAI2D_ext and TSAI3D_ext We choosed to make profit of inheritance mechanism to represent the above classes It uses camera's intrinsic parametes and linear least square resolver to compute the transition matrix.
Definition at line 28 of file tsai.hpp.
Public Types |
| enum | ReferenceType { JAFAR,
CALIFE
} |
| | public members and attributes
|
Public Member Functions |
| | TsaiLocalizer (const double &_alphaU, const double &_alphaV, const double &_u0, const double &_v0, const ReferenceType &type=TsaiLocalizer::JAFAR) |
| | Constructor.
|
|
void | setPointsVector (const Points2d3d &_pointsVector) |
| | sets the 2D3D points vector (deprecated)
|
|
void | addPoint2d3d (const Point2d3d &p2d3d) |
|
void | addPoint2d3d (const jblas::vec2 &p2d, const jblas::vec3 &p3d) |
|
void | addPoint2d3d (const double &u, const double &v, const double &x, const double &y, const double &z) |
| void | setPointsVector (const std::vector< jblas::vec2 > &_2DPointsVector, const std::vector< jblas::vec3 > &_3DPointsVector) |
| | contructs 2D3D points vector from a Point2D vector and a Point3D vector
|
|
virtual void | localize ()=0 |
| | main methode for the localizers, to be implemented
|
|
double | computeError (const jblas::vec &a, const double &tz, const jblas::vec &b, const int &nb) |
| | compute the average error
|
|
jblas::mat44 | transitionMatrix () |
| | returns the transition matrix
|
| size_t | size () |
Protected Member Functions |
|
void | initSystem (const int &_cols=1, const int &_rows=1) |
| | initialisation function for the lls system
|
|
double | sign (const double &d) |
| | returns -1 if negativ or zero else returns 1
|
Protected Attributes |
|
double | alphaU |
| | intrinsic camera's parameter alphaU
|
|
double | alphaV |
| | intrinsic camera's parameter alphaV
|
|
double | u0 |
| | intrinsic camera's parameter u0
|
|
double | v0 |
| | intrinsic camera's parameter v0
|
|
Points2d3d | pointsVector |
| | 2D3D points vector
|
|
jblas::mat | a |
| | left hand matrix of the linear system
|
|
jblas::vec | b |
| | right hand vector of the linear system
|
|
jblas::vec | x |
| | solution vector of the linear system
|
|
jmath::LinearLeastSquares | lls |
| | Linear Least Square solver.
|
|
jblas::mat44 | M |
| | M matrix of transition.
|
Static Protected Attributes |
| static const double | epsylon |
| | protected members and attributes
|