|
Jafar
|
|
Jafar
|
Definition at line 47 of file fusion.hpp.
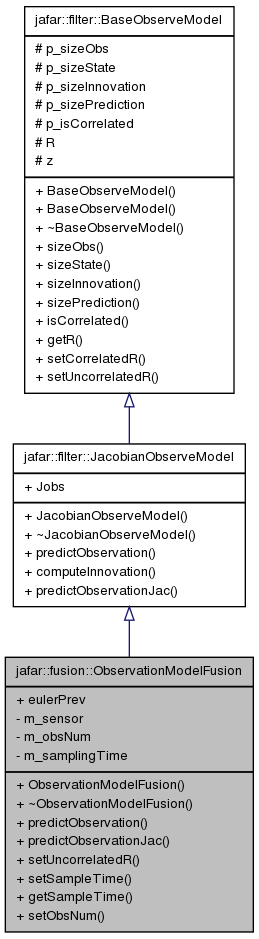
Public Member Functions | |
| ObservationModelFusion (std::size_t sizeObs_, std::size_t sizeState_, int sensor) | |
| jblas::vec const & | predictObservation (jblas::vec const &x_) |
| Predict observation for state x_. | |
| virtual void | predictObservationJac (const jblas::vec &x_) |
| call this method to compute the jacobian of the observation function | |
| void | setUncorrelatedR (jblas::vec R_) |
| void | setSampleTime (double time) |
| double | getSampleTime () |
| void | setObsNum (std::size_t num) |
Public Attributes | |
| jblas::vec | eulerPrev |
Private Attributes | |
| int | m_sensor |
| std::size_t | m_obsNum |
| double | m_samplingTime |
| jblas::vec const& jafar::fusion::ObservationModelFusion::predictObservation | ( | jblas::vec const & | x_ | ) | [virtual] |
Predict observation for state x_.
In order to minimize memory allocation, z vector is allocated once, predictObservation() implementation should look like:
const vec& predictObservation(const vec& x_) { JFR_PRECOND(x_.size() == _sizeState, message); // compute z function of x_ return z; }
Implements jafar::filter::JacobianObserveModel.
| Generated on Wed Oct 15 2014 00:37:36 for Jafar by doxygen 1.7.6.1 |

|

