|
Jafar
|
|
Jafar
|
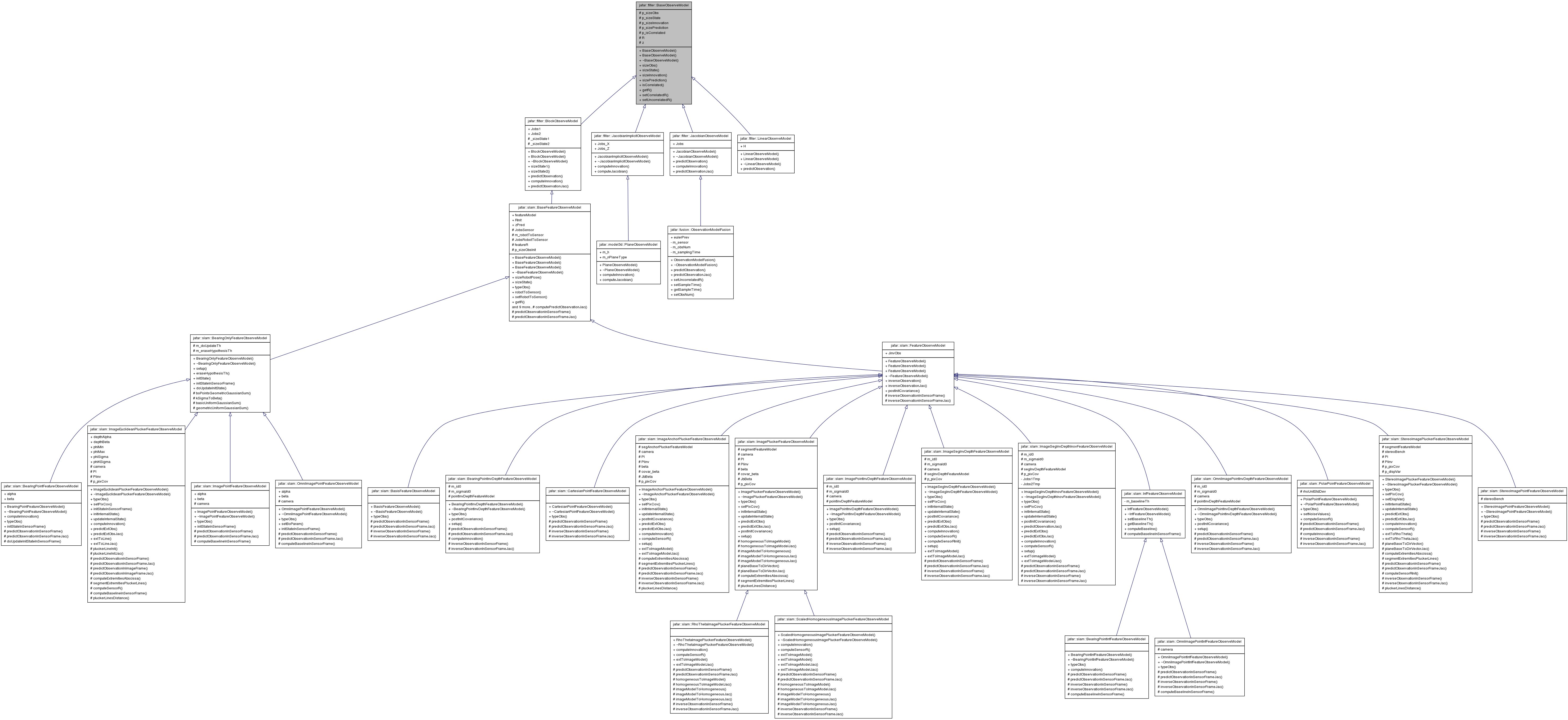
Base class for observation models. More...
Base class for observation models.
Definition at line 17 of file observeModel.hpp.
#include <observeModel.hpp>
Public Member Functions | |
| BaseObserveModel (std::size_t sizeObs_, std::size_t sizeState_) | |
| BaseObserveModel (std::size_t sizeObs_, std::size_t sizeState_, std::size_t sizeInnovation_, std::size_t sizePrediction_) | |
| std::size_t | sizeObs () const |
| std::size_t | sizeState () const |
| std::size_t | sizeInnovation () const |
| std::size_t | sizePrediction () const |
| bool | isCorrelated () const |
| virtual jblas::sym_mat const & | getR () const |
| void | setCorrelatedR (jblas::sym_mat const &R_) |
| Set a constant noise model. | |
| void | setUncorrelatedR (jblas::vec const &R_) |
| Set a constant noise model. | |
Protected Attributes | |
| std::size_t | p_sizeObs |
| Compute observation noise covariance. | |
| std::size_t | p_sizeState |
| std::size_t | p_sizeInnovation |
| std::size_t | p_sizePrediction |
| bool | p_isCorrelated |
| jblas::sym_mat | R |
| Covariance of observation noise. | |
| jblas::vec | z |
| pre-allocated vector for predicted obervation or innovation. | |
std::size_t jafar::filter::BaseObserveModel::p_sizeObs [protected] |
Compute observation noise covariance.
A default implementation is provided, it does nothing (constant model).
Definition at line 46 of file observeModel.hpp.
| Generated on Wed Oct 15 2014 00:37:36 for Jafar by doxygen 1.7.6.1 |

|

