|
Jafar
|
|
Jafar
|
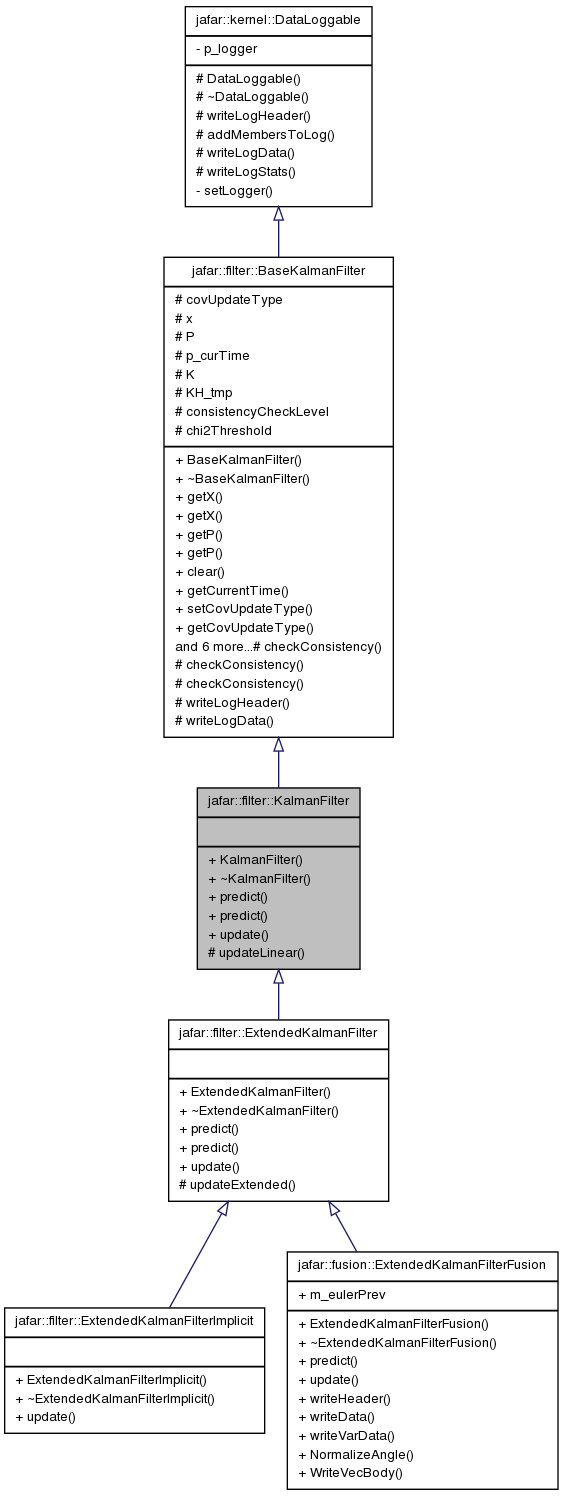
This class implements a Kalman filter. More...
This class implements a Kalman filter.
Definition at line 189 of file kalmanFilter.hpp.
#include <kalmanFilter.hpp>
Public Member Functions | |
| KalmanFilter (std::size_t size_) | |
| Create a kalman filter. | |
| void | predict (const LinearPredictModel &m_) |
| This function computes the prediction step. | |
| void | predict (LinearCommandPredictModel &m_, jblas::vec const &u_) |
| This function computes the prediction step. | |
| void | update (LinearObserveModel &m_, jblas::vec &z_) |
| This function computes the observation step. | |
Protected Member Functions | |
| void | updateLinear (const jblas::mat_range &H_, const jblas::vec_range &z_, double R_) |
| This function computes the observation step (observation is given). | |
| jafar::filter::KalmanFilter::KalmanFilter | ( | std::size_t | size_ | ) |
Create a kalman filter.
| size_ | dimension of the state |
| void jafar::filter::KalmanFilter::predict | ( | const LinearPredictModel & | m_ | ) |
This function computes the prediction step.
| m_ | linear predict model |
| void jafar::filter::KalmanFilter::predict | ( | LinearCommandPredictModel & | m_, |
| jblas::vec const & | u_ | ||
| ) |
This function computes the prediction step.
| m_ | linear command predict model |
| void jafar::filter::KalmanFilter::update | ( | LinearObserveModel & | m_, |
| jblas::vec & | z_ | ||
| ) |
This function computes the observation step.
| m_ | linear observation model |
| z_ | measure |
| void jafar::filter::KalmanFilter::updateLinear | ( | const jblas::mat_range & | H_, |
| const jblas::vec_range & | z_, | ||
| double | R_ | ||
| ) | [protected] |
This function computes the observation step (observation is given).
In the case of a scalar observation.
| H_ | observation matrix (only one row) |
| z_ | measure |
| R_ | measure noise variance |
| Generated on Wed Oct 15 2014 00:37:36 for Jafar by doxygen 1.7.6.1 |

|

