|
Jafar
|
|
Jafar
|
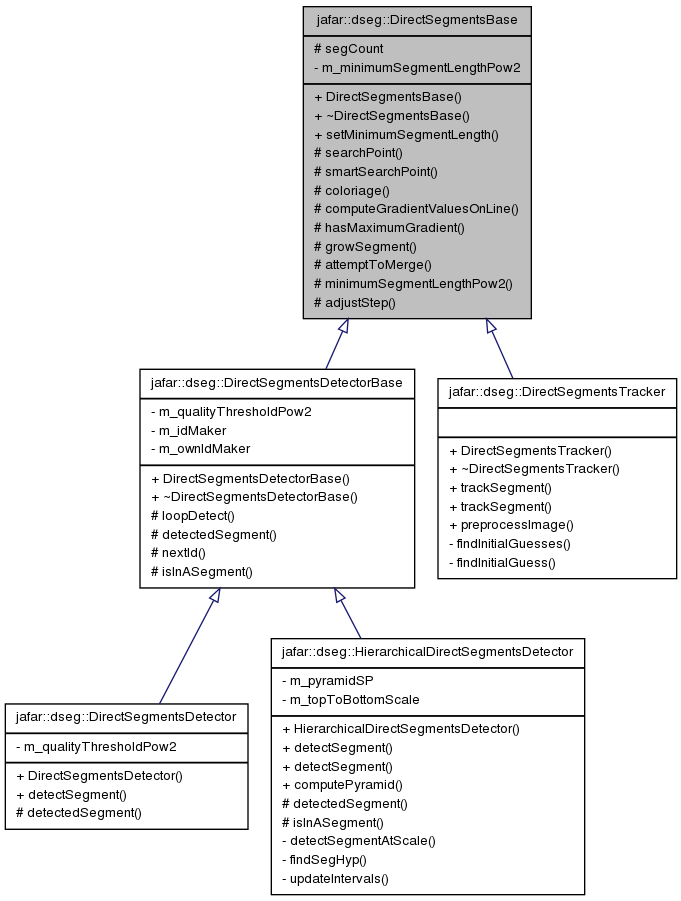
Base class for algorithms that wants to use the segment growing algorithm, for detection or tracking. More...
Base class for algorithms that wants to use the segment growing algorithm, for detection or tracking.
Definition at line 53 of file DirectSegmentsBase.hpp.
#include <DirectSegmentsBase.hpp>
Public Member Functions | |
| void | setMinimumSegmentLength (double _minimumSegmentLength) |
| The search size is the number of point use to adjust the segment. | |
Protected Member Functions | |
| bool | searchPoint (GrowSegmentContext &_context, double _searchStep, const jblas::vec2 &_pi, double &_xr, double &_yr, double &_angler, int &_bestI, int _searchNbSteps) |
| bool | smartSearchPoint (GrowSegmentContext &_context, double _searchStep, const jblas::vec2 &_pi, double &_xr, double &_yr, double &_angler, int &_bestI, int _searchNbSteps) |
| void | coloriage (double x_1, double y_1, double x_2, double y_2, image::Image &inasegment, int _value) |
| void | computeGradientValuesOnLine (double &a, double &b, double angle, double cosA, double sinA, float *_mag1, float *_mag2, float *_mag3, int j) const |
| bool | hasMaximumGradient (double _angle, double _cosA, double _sinA, float *_mag1, float *_mag2, float *_mag3, int j) const |
| bool | growSegment (GrowSegmentContext &_context, int _step=1) |
| SegmentHypothesis * | attemptToMerge (SegmentHypothesis *segHyp, const image::Image &inasegment, SegmentsSet &segmentHypothesises, const std::map< int, int > &segmentToCount) |
| double | minimumSegmentLengthPow2 () const |
| void | adjustStep (double &_step, int &_searchNbSteps) const |
Protected Attributes | |
| int | segCount |
Private Attributes | |
| double | m_minimumSegmentLengthPow2 |
| void jafar::dseg::DirectSegmentsBase::setMinimumSegmentLength | ( | double | _minimumSegmentLength | ) |
The search size is the number of point use to adjust the segment.
This defines the number of points used for discretization with a line. Define the maximal search step. If the current step is higher, the number of steps will be adjusted so that the area covered by the search remains the same. And the value of maximalSearchStep is used as a step. Set the threshold on how much the gradients must be colinear to accept a point in the line. Set the threshold for the maximum of gradient. Which is used to know if a pixel is the start of a gradient, it's the minimum difference between the gradient on the pixel and the gradients of the neighbourghood. Set the minimum length of segments. Set the method used for computing the probability of presence of a segment. Define the maximum length of the search area for point measurement
| Generated on Wed Oct 15 2014 00:37:34 for Jafar by doxygen 1.7.6.1 |

|

