|
Jafar
|
|
Jafar
|
Definition at line 81 of file trackrobot.hpp.
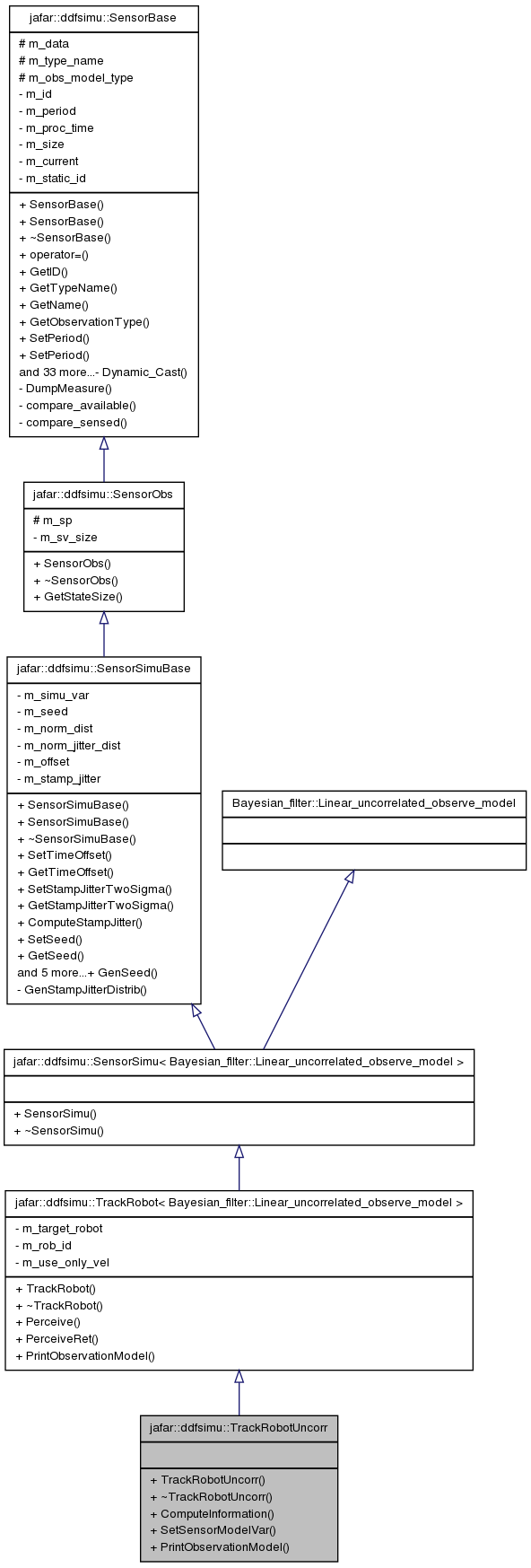
Public Member Functions | |
| TrackRobotUncorr (unsigned short x_size, unsigned short rob_id, bool use_only_vel, RobotSimu *other_robot) | |
| void | ComputeInformation (VEC const &z, VEC &i, MSYM &I) |
| Compute i and I based on the measurement vector. | |
| void | SetSensorModelVar (VEC const &var) |
| void | PrintObservationModel () |
| Generated on Wed Oct 15 2014 00:37:34 for Jafar by doxygen 1.7.6.1 |

|

