|
Jafar
|
|
Jafar
|
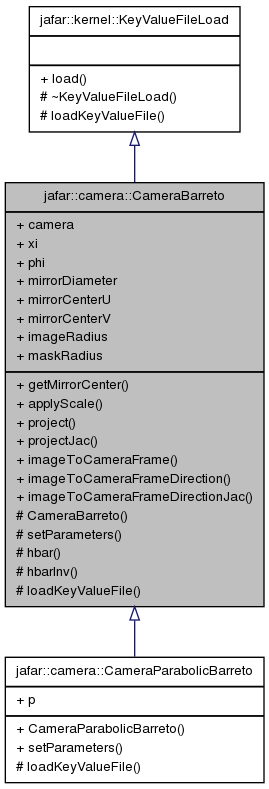
Barreto central catadiopttric camera model. More...
Barreto central catadiopttric camera model.
Definition at line 17 of file cameraBarreto.hpp.
#include <cameraBarreto.hpp>
Public Member Functions | |
| jblas::vec2 | getMirrorCenter () const |
| void | applyScale (double scale) |
| template<class Vec , class Pix > | |
| bool | project (Vec const &v, Pix &pix) const |
| template<class Vec , class Mat > | |
| void | projectJac (Vec const &v, Mat &J) |
| template<class Pix , class Vec > | |
| void | imageToCameraFrame (Pix const &pix, Vec &v) const |
| Coordinate of a pixel in the camera frame. | |
| template<class Pix , class Vec > | |
| void | imageToCameraFrameDirection (Pix const &pix, Vec &v) const |
| Direction of a pixel in the camera frame. | |
| template<class Pix , class Mat > | |
| void | imageToCameraFrameDirectionJac (Pix const &pix, Mat &J) const |
Public Attributes | |
| jafar::camera::CameraPinhole | camera |
| projective camera model. | |
| double | xi |
| mirror parameter. | |
| double | phi |
| mirror parameter. | |
| double | mirrorDiameter |
| radius of the mirror (meter). | |
| double | mirrorCenterU |
| center of the mirror in the image (u coordinate) | |
| double | mirrorCenterV |
| center of the mirror in the image (v coordinate) | |
| double | imageRadius |
| radius of the mirror in the image (pixel). | |
| double | maskRadius |
| radius of the central mask zone in the image, default to 0. | |
Protected Member Functions | |
| void | setParameters (int width_, int height_, double u0_, double v0_, double alphaU_, double alphaV_, double xi_, double phi_, double mirrorRadius_, double imageRadius_, double maskRadius_) |
| template<class Vec1 , class Vec2 > | |
| void | hbar (Vec1 const &x, Vec2 &xbar) const |
| template<class Vec1 , class Vec2 > | |
| void | hbarInv (Vec1 const &xbar, Vec2 &x) const |
| virtual void | loadKeyValueFile (jafar::kernel::KeyValueFile const &keyValueFile)=0 |
| Implement this method calling repeatedly KeyValueFile::getItem() method. | |
| void jafar::camera::CameraBarreto::imageToCameraFrameDirection | ( | Pix const & | pix, |
| Vec & | v | ||
| ) | const [inline] |
Direction of a pixel in the camera frame.
The results v is a unit vector.
Definition at line 167 of file cameraBarreto.hpp.
References camera, imageToCameraFrame(), JFR_NUMERIC, and JFR_TRACE_END.
Referenced by jafar::camera::pixelCyl2pixelPano(), and jafar::camera::univReprojectionCylindric().
| Generated on Wed Oct 15 2014 00:37:32 for Jafar by doxygen 1.7.6.1 |

|

