|
Jafar
|
|
Jafar
|
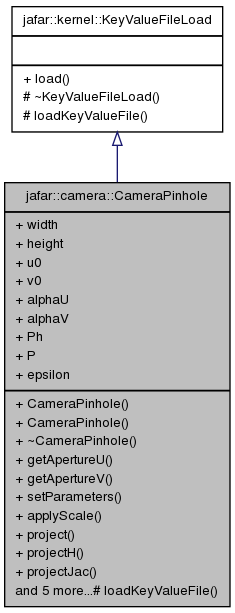
Camera Pinhole model. More...
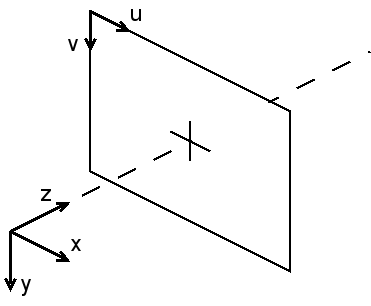
Camera Pinhole model.
image frame: (u,v): column, row camera frame: (x,y,z): right, down, depth
Definition at line 26 of file cameraPinhole.hpp.
#include <cameraPinhole.hpp>
Public Member Functions | |
| CameraPinhole () | |
| Default constructor. | |
| CameraPinhole (CameraPinhole const &c_) | |
| Copy constructor. | |
| double | getApertureU () const |
| double | getApertureV () const |
| void | setParameters (int width_, int height_, double u0_, double v0_, double alphaU_, double alphaV_) |
| Set the parameters of the perspective camera model. | |
| void | applyScale (double scale) |
| Scales the current model. | |
| template<class Vec , class Pix > | |
| bool | project (Vec const &v, Pix &pix) const |
| Project a 3D point on the camera plane. | |
| template<class Vec , class Pix > | |
| bool | projectH (Vec const &v, Pix &pix) const |
| Project a 3D point on the camera plane.This function works with homogeneous coordinates. | |
| template<class Vec , class Mat > | |
| void | projectJac (Vec const &v, Mat &J) const |
| jacobian of project | |
| template<class Vec , class Mat , class Pix > | |
| void | projectJac (Vec const &v, Pix &pix, Mat &J) const |
| project and jacobian of project | |
| template<class Pix , class Vec > | |
| void | imageToCameraFrame (Pix const &pix, Vec &v) const |
| Pixel coordinate in camera frame. | |
| template<class Pix , class Mat > | |
| void | imageToCameraFrameJac (Pix const &pix, Mat &J) const |
| Jacobian of imageToCameraFrame() | |
| template<class Pix , class Vec > | |
| void | imageToCameraFrameDirection (Pix const &pix_, Vec &v) const |
| Pixel direction in camera frame. | |
| template<class Pix , class Mat > | |
| void | imageToCameraFrameDirectionJac (Pix const &pix, Mat &J) const |
| Jacobian of directionInCameraFrame() | |
| jblas::vec4 | getIntrinsicParams () |
| Get intrinsic parameters vector. | |
Public Attributes | |
| int | width |
| int | height |
| double | u0 |
| double | v0 |
| double | alphaU |
| double | alphaV |
| jblas::mat | Ph |
| (3x4) projection matrix (homogeneous coordinates) | |
| jblas::mat_range | P |
| (2x3) projection matrix (euclidean coordinates) | |
Static Public Attributes | |
| static const double | epsilon |
Protected Member Functions | |
| void | loadKeyValueFile (jafar::kernel::KeyValueFile const &keyValueFile) |
| Implement this method calling repeatedly KeyValueFile::getItem() method. | |
Friends | |
| class | StereoBench |
Get intrinsic parameters vector.
Definition at line 241 of file cameraPinhole.hpp.
| bool jafar::camera::CameraPinhole::project | ( | Vec const & | v, |
| Pix & | pix | ||
| ) | const [inline] |
Project a 3D point on the camera plane.
This function works with euclidean coordinates.
| jafar::kernel::JafarException | with id NUMERIC_CONDITION if the projection cannot be computed. |
Definition at line 77 of file cameraPinhole.hpp.
References JFR_NUMERIC, JFR_PRECOND, and P.
Referenced by projectJac().
| bool jafar::camera::CameraPinhole::projectH | ( | Vec const & | v, |
| Pix & | pix | ||
| ) | const [inline] |
Project a 3D point on the camera plane.This function works with homogeneous coordinates.
Definition at line 107 of file cameraPinhole.hpp.
References JFR_PRECOND, and Ph.
| Generated on Wed Oct 15 2014 00:37:33 for Jafar by doxygen 1.7.6.1 |

|

