|
Jafar
|
|
Jafar
|
Public Types | |
|
typedef std::map< int, SBACamera >::const_iterator | CamerasIterator |
| define iterator over cameras | |
Public Member Functions | |
| void | insertCamera (const int &camId, const SBACamera &cam) |
| inserts a SBACamera with its index | |
| SBACamera | getCamera (const int &camId) |
| returns a SBACamera given its index | |
|
std::map< int, SBACamera > ::const_iterator | begin () |
| begin of cameras map | |
|
std::map< int, SBACamera > ::const_iterator | end () |
| end of cameras map | |
| size_t | size () |
| total number of cameras | |
| size_t | nbFrames () |
| total number of frames for all the cameras | |
| void | insertPose (const int &poseIndex, jafar::geom::T3D *pose) |
| jafar::geom::T3DQuaternion * | getPose (const int &poseIndex) |
| void | setCameraIntrinsics (const int &camIndex, const jafar::camera::CameraPinhole &pCamera) |
|
std::map< int, geom::T3DQuaternion * > | getPoses () |
Protected Member Functions | |
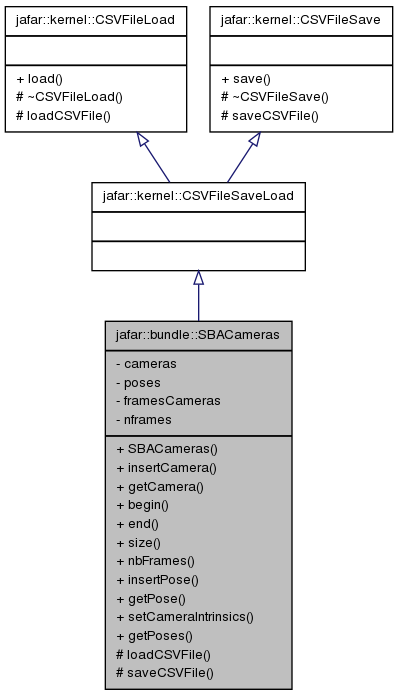
| void | loadCSVFile (kernel::CSVFile &csvFile) |
| Implement this method calling repeatedly CSVFile::getItem() method. | |
| void | saveCSVFile (kernel::CSVFile &csvFile) |
| Implement this method calling repeatedly CSVFile::setItem() method. | |
Private Attributes | |
| std::map< int, SBACamera > | cameras |
|
std::map< int, geom::T3DQuaternion * > | poses |
| std::map< int, int > | framesCameras |
Static Private Attributes | |
| static size_t | nframes |
| Generated on Wed Oct 15 2014 00:37:32 for Jafar by doxygen 1.7.6.1 |

|

