|
Jafar
|
|
Jafar
|
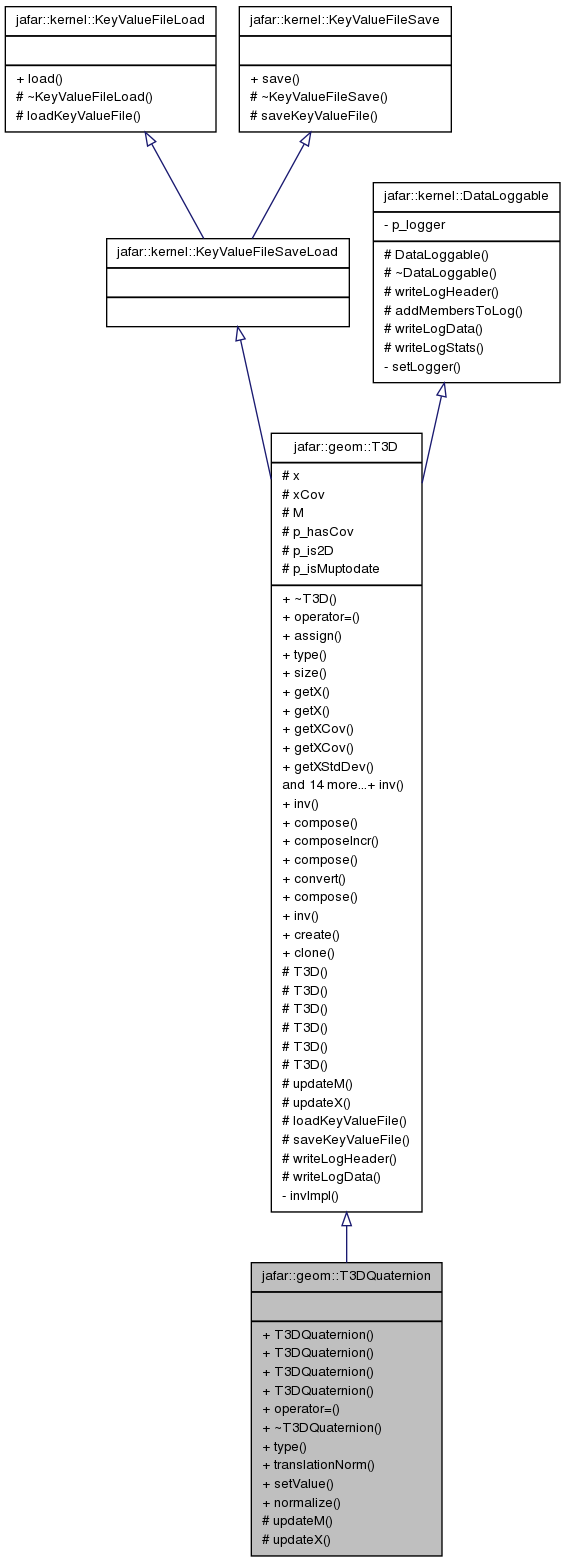
A 3D transformation where the rotation is represented with a quaternion. More...
A 3D transformation where the rotation is represented with a quaternion.
A vectorized T3D is in this form [x,y,z,qw,qx,qy,qz].
[x,y,z] represents translation.
[qw,qx,qy,qz] represents rotation .
qw the real part of the quaternion
Definition at line 23 of file t3dQuaternion.hpp.
#include <t3dQuaternion.hpp>
Public Member Functions | |
| T3DQuaternion (bool hasCov_=false) | |
| T3DQuaternion (const jblas::vec &x_, bool hasCov_=false) | |
| T3DQuaternion (const jblas::vec &x_, const jblas::sym_mat &xCov_) | |
| T3DQuaternion (const T3DQuaternion &t_) | |
| T3DQuaternion & | operator= (const T3DQuaternion &t_) |
| Type | type () const |
| double | translationNorm () const |
| void | setValue (double x_, double y_, double z_, double qw_, double qx_, double qy_, double qz_) |
| void | normalize () |
Protected Member Functions | |
| void | updateM () const |
| update the homogeneous matrix from x. | |
| void | updateX () |
| update x from the homogeneous matrix. | |
Friends | |
| class | T3D |
| Type jafar::geom::T3DQuaternion::type | ( | ) | const [inline, virtual] |
Implements jafar::geom::T3D.
Definition at line 36 of file t3dQuaternion.hpp.
References jafar::geom::T3D::QUATERNION.
| Generated on Wed Oct 15 2014 00:37:37 for Jafar by doxygen 1.7.6.1 |

|

