|
Jafar
|
|
Jafar
|
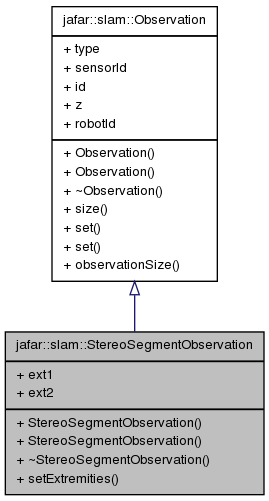
Observation of a segment. More...
Observation of a segment.
Definition at line 78 of file segmentFeature.hpp.
#include <segmentFeature.hpp>
Public Member Functions | |
| StereoSegmentObservation (unsigned int _robotId=0) | |
| Constructor. | |
| StereoSegmentObservation (StereoSegmentObservation const &obs) | |
| Copy constructor Constructs an observation from a given observation. | |
| virtual | ~StereoSegmentObservation () |
| Destructor. | |
| void | setExtremities (jblas::vec3 const &ext1_, jblas::vec3 const &ext2_) |
| Sets the extremities to the observation. | |
Public Attributes | |
| jblas::vec3 | ext1 |
| first extremity in the image plane with disparity | |
| jblas::vec3 | ext2 |
| second extremity in the image plane with disparity | |
| jafar::slam::StereoSegmentObservation::StereoSegmentObservation | ( | unsigned int | _robotId = 0 | ) | [inline] |
Constructor.
Constructs an empty observation from a robot
| _robotId | robot identifier |
Definition at line 90 of file segmentFeature.hpp.
| jafar::slam::StereoSegmentObservation::StereoSegmentObservation | ( | StereoSegmentObservation const & | obs | ) | [inline] |
Copy constructor Constructs an observation from a given observation.
| obs | The observation to copy |
Definition at line 98 of file segmentFeature.hpp.
| void jafar::slam::StereoSegmentObservation::setExtremities | ( | jblas::vec3 const & | ext1_, |
| jblas::vec3 const & | ext2_ | ||
| ) | [inline] |
Sets the extremities to the observation.
| ext1_ | the first endpoint |
| ext2_ | the second endpoint |
Definition at line 110 of file segmentFeature.hpp.
| Generated on Wed Oct 15 2014 00:37:49 for Jafar by doxygen 1.7.6.1 |

|

