|
Jafar
|
|
Jafar
|
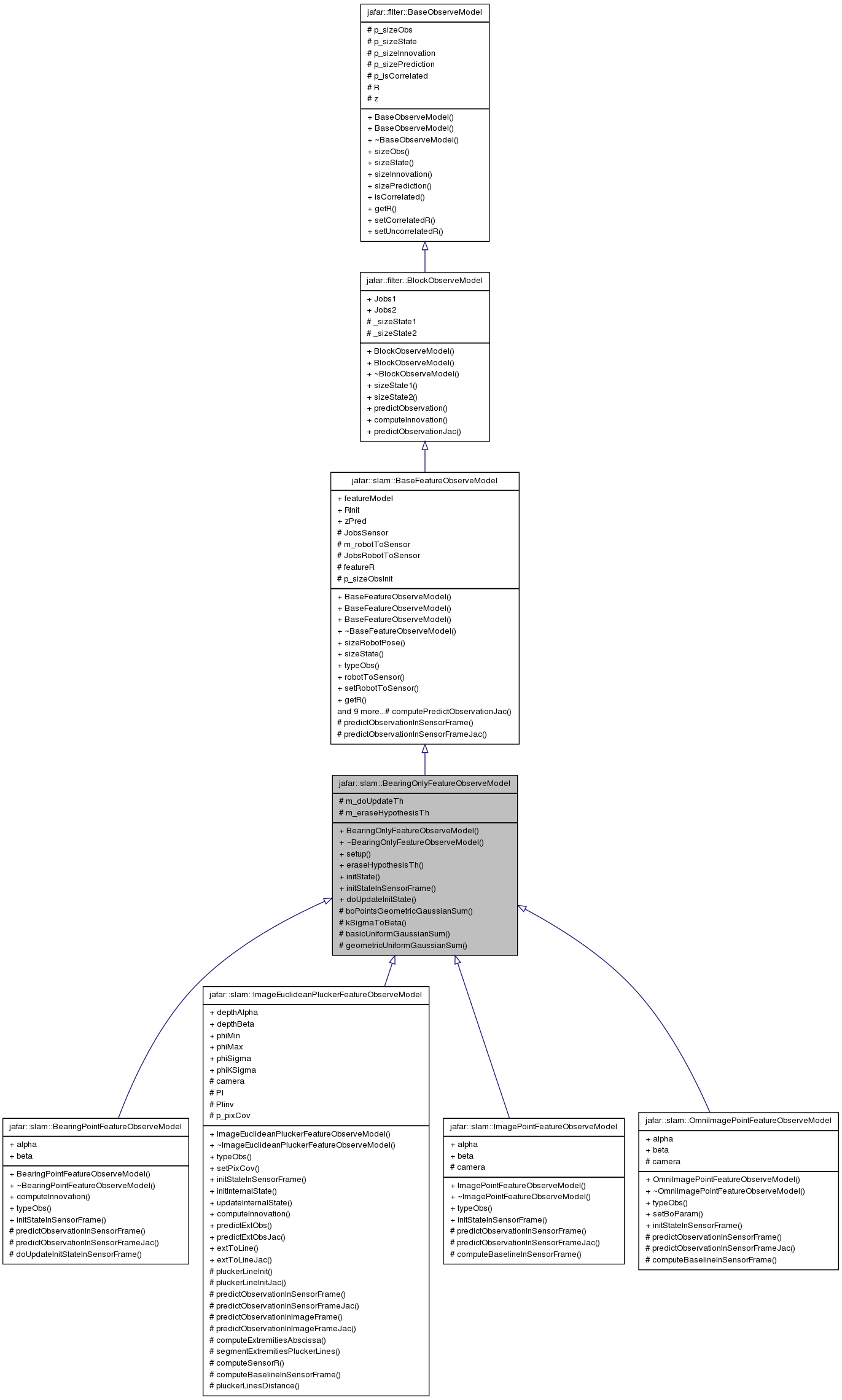
Bearing only feature observation model. More...
Bearing only feature observation model.
Definition at line 150 of file bearingOnlyFeature.hpp.
#include <bearingOnlyFeature.hpp>
Public Member Functions | |
| BearingOnlyFeatureObserveModel (FeatureModel &model, std::size_t sizeObs_) | |
| void | setup (double doUpdateTh=8, double eraseHypothesisTh=20) |
| double | eraseHypothesisTh () const |
| void | initState (InitFeature &feature_, Observation const &obs_, double dMin_, double dMax_) |
| Approximate the initial probability function with a sum of gaussians. | |
| virtual void | initStateInSensorFrame (InitFeature &feature_, Observation const &obs_, double dMin_, double dMax_)=0 |
| bool | doUpdateInitState (jblas::vec const &closestMemberState, jblas::vec const &deltaPose) |
Protected Member Functions | |
| void | boPointsGeometricGaussianSum (jblas::vec const &d_, jblas::sym_mat const &dCov_, double alpha_, double beta_, double sMin_, double sMax_, InitFeature::InitStateType &gaussianSum) |
| This fonction computes the special sum of gaussians representing points from the line of sight, and the parameters of the sum. | |
Static Protected Member Functions | |
| static double | kSigmaToBeta (double alpha, double kSigma) |
| computes the beta value | |
| static void | basicUniformGaussianSum (double min, double max, double sigma, double kSigma, std::list< jafar::jmath::GaussianVector > &gaussianSum) |
| static void | geometricUniformGaussianSum (double alpha, double beta, double sMin, double sMax, std::list< jafar::jmath::WeightedGaussianVector > &gaussianSum) |
Protected Attributes | |
| double | m_doUpdateTh |
| threshold for updating or not the init state | |
| double | m_eraseHypothesisTh |
| threshold for updating or not the init state | |
| void jafar::slam::BearingOnlyFeatureObserveModel::initState | ( | InitFeature & | feature_, |
| Observation const & | obs_, | ||
| double | dMin_, | ||
| double | dMax_ | ||
| ) |
Approximate the initial probability function with a sum of gaussians.
Delegates work to initStateInSensorFrame() and takes care of the robot frame to sensor frame transformation.
| Generated on Wed Oct 15 2014 00:37:48 for Jafar by doxygen 1.7.6.1 |

|

