|
Jafar
|
|
Jafar
|
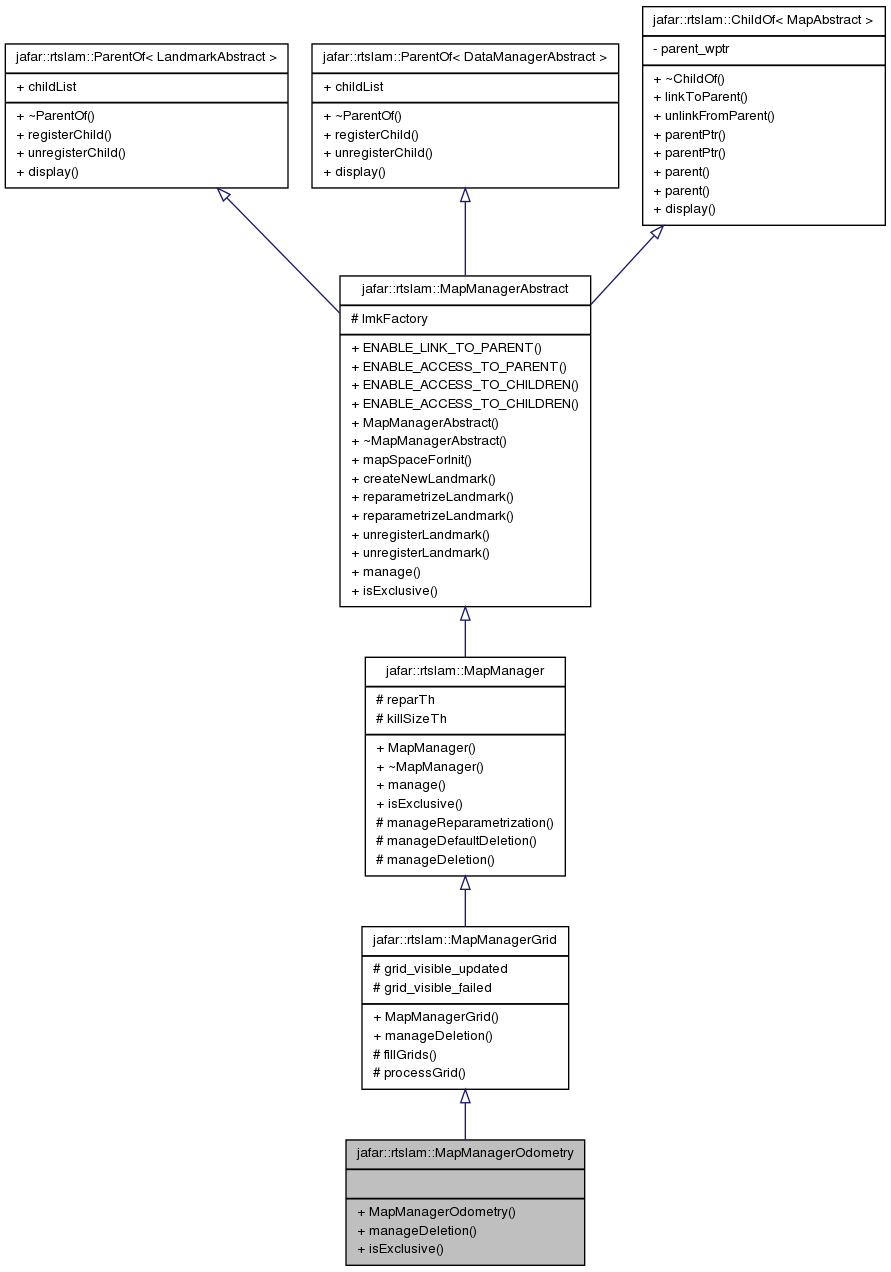
Map manager with a very short memory policy. More...
Map manager with a very short memory policy.
It deletes very quickly lost landmarks, so that it won't be able to close much loops, but can track more landmarks and be faster.
Definition at line 158 of file mapManager.hpp.
#include <mapManager.hpp>
Public Member Functions | |
| MapManagerOdometry (landmark_factory_ptr_t lmkFactory, double reparTh, double killSizeTh, double gridAngularRes, double gridDistInit, double gridDistFactor, int gridNDist, double gridPhiFactor) | |
| virtual void | manageDeletion () |
| virtual bool | isExclusive (observation_ptr_t obsPtr) |
| Returns if the given observation must be exclusive in the FeatureManager (ie we believe there are good chances to find it again very soon), or if new landmarks can be initialized ignoring this observation (ie we believe there is little chance to find it again very soon) | |
| Generated on Wed Oct 15 2014 00:37:45 for Jafar by doxygen 1.7.6.1 |

|

