|
Jafar
|
|
Jafar
|
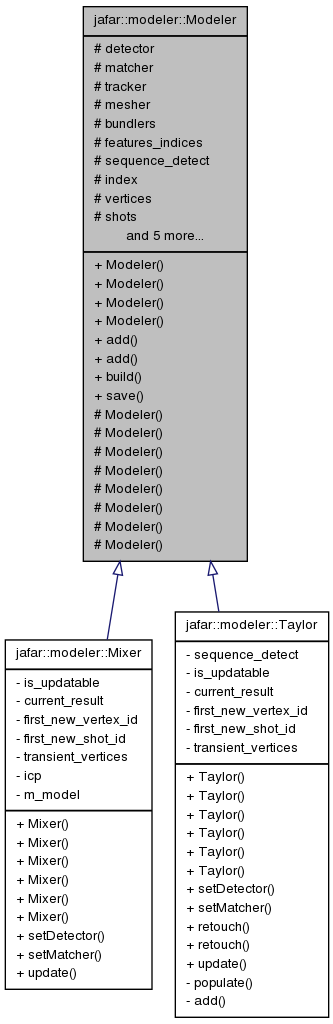
Modeler is a class that builds a mesh for an object represented in a sequence of image. More...
Modeler is a class that builds a mesh for an object represented in a sequence of image.
When add is called, it runs a gfm::EngineTracking and according to the result of the match, either adds a new triangulation system (i.e. bundler::ViewsManager2) or updates an existing one with a new entry.
When build is called it iterate over the views managers and adds a vertex to the mesh.
The obtained mesh can then be saved in PLY format.
Definition at line 37 of file modeler.hpp.
#include <modeler.hpp>
Classes | |
| struct | shot |
| structure to hold a shot More... | |
| struct | vertex |
| holds all the data about a vertex More... | |
Public Member Functions | |
| Modeler (camera::CameraType type, const jblas::vec &intrinsics) | |
| Modeler (camera::CameraType type, const jblas::vec &intrinsics, fdetect_v2::Detector< Feature > *_detector, gfm_v2::Matcher< Feature > *_matcher) | |
| the full package modeler for a single camera | |
| Modeler (fdetect_v2::Detector< Feature > *_detector, gfm_v2::Matcher< Feature > *_matcher) | |
| the full package modeler with no camera | |
| int | add (const image::Image &img, geom::T3D *pose) |
| adds an image and a pose to the modeler and increments the counter img Image to process pose Camera frame when image was shot | |
| int | add (camera::CameraType type, const jblas::vec &intrinsics, geom::T3D *pose, const image::Image &img) |
| adds a camera shot to the modeler and increments the counter img Image to process pose Camera frame when image was shot | |
| void | build () |
| invoke the mesher on the computed vertices | |
| void | save (const std::string &file_name, bool is_binary=false) |
| save computed mesh to a ply file | |
Protected Types | |
|
typedef fdetect_v2::InterestFeature < fdetect_v2::FloatDescriptor > | Feature |
|
typedef std::vector< Feature * > ::const_iterator | features_iterator |
|
typedef fdetect_v2::DetectionResult < Feature > | DR |
|
typedef gfm_v2::MatchingResult < Feature > | MR |
|
typedef boost::bimap< Feature *, unsigned int > | bm_type |
|
typedef bm_type::left_map::const_iterator | features_citerator |
|
typedef bm_type::right_map::const_iterator | indices_citerator |
Protected Member Functions | |
| Modeler (JfrMesh &_mesh) | |
| Modeler (JfrMesh &_mesh, camera::CameraType type, const jblas::vec &intrinsics) | |
| Modeler (JfrMesh &_mesh, camera::CameraType type, const jblas::vec &intrinsics, fdetect_v2::Detector< Feature > *_detector, gfm_v2::Matcher< Feature > *_matcher) | |
| the full package modeler for a single camera | |
| Modeler (JfrMesh &_mesh, fdetect_v2::Detector< Feature > *_detector, gfm_v2::Matcher< Feature > *_matcher) | |
| the full package modeler with no camera | |
| Modeler (const std::string &ply_mesh_file, camera::CameraType type, const jblas::vec &intrinsics) | |
| Modeler (const std::string &ply_mesh_file, camera::CameraType type, const jblas::vec &intrinsics, fdetect_v2::Detector< Feature > *_detector, gfm_v2::Matcher< Feature > *_matcher) | |
| the full package modeler for a single camera | |
| Modeler (const std::string &ply_mesh_file, fdetect_v2::Detector< Feature > *_detector, gfm_v2::Matcher< Feature > *_matcher) | |
| the full package modeler with no camera | |
| Modeler (const std::string &ply_mesh_file) | |
Protected Attributes | |
| fdetect_v2::Detector< Feature > * | detector |
| interest features detector | |
| gfm_v2::Matcher< Feature > * | matcher |
| interest features matcher | |
| gfm_v2::EngineTracking< Feature > * | tracker |
| interest feature tracker | |
| modeler::Mesher * | mesher |
| the mesh builder | |
|
std::map< unsigned int, bundler::ViewsManager2 * > | bundlers |
| map of bundlers | |
| bm_type | features_indices |
|
std::map< unsigned int, fdetect_v2::DetectionResult < Feature > > | sequence_detect |
| storage of detection results | |
| unsigned int | index |
| std::map< unsigned int, vertex > | vertices |
| map of vertexes data | |
| std::map< unsigned int, shot > | shots |
| map of shots data | |
| unsigned int | global |
| the global id for the interest features, if not specified starts with 0 | |
| unsigned int | counter |
| the global counter for images and poses, if not specified starts with 0 | |
| std::string | calibration |
| pinhole camera calibration file name | |
| bool | one_camera |
| is this a one camera modeler? set by constructor | |
|
std::pair< camera::CameraType, jblas::vec > | camera |
| cameras storage map | |
| MR | result |
| holds current matching result | |
| jafar::modeler::Modeler::Modeler | ( | camera::CameraType | type, |
| const jblas::vec & | intrinsics | ||
| ) | [inline] |
| type | Camera type (see camera module) |
| intrinsics | Camera intrinsic parameters |
Definition at line 115 of file modeler.hpp.
References camera.
| jafar::modeler::Modeler::Modeler | ( | JfrMesh & | _mesh | ) | [inline, protected] |
| _mesh | mesh to be processed |
Definition at line 143 of file modeler.hpp.
| jafar::modeler::Modeler::Modeler | ( | JfrMesh & | _mesh, |
| camera::CameraType | type, | ||
| const jblas::vec & | intrinsics | ||
| ) | [inline, protected] |
| _mesh | mesh to be processed |
| type | Camera type (see camera module) |
| intrinsics | Camera intrinsic parameters |
Definition at line 154 of file modeler.hpp.
References camera.
| jafar::modeler::Modeler::Modeler | ( | JfrMesh & | _mesh, |
| camera::CameraType | type, | ||
| const jblas::vec & | intrinsics, | ||
| fdetect_v2::Detector< Feature > * | _detector, | ||
| gfm_v2::Matcher< Feature > * | _matcher | ||
| ) | [inline, protected] |
the full package modeler for a single camera
| _mesh | mesh to be processed |
| type | Camera type (see camera module) |
| intrinsics | Camera intrinsic parameters |
| _detector | detector of interest features |
| _matcher | matcher of interest features |
Definition at line 171 of file modeler.hpp.
References camera.
| jafar::modeler::Modeler::Modeler | ( | JfrMesh & | _mesh, |
| fdetect_v2::Detector< Feature > * | _detector, | ||
| gfm_v2::Matcher< Feature > * | _matcher | ||
| ) | [inline, protected] |
the full package modeler with no camera
| _mesh | mesh to be processed |
| _detector | detector of interest features |
| _matcher | matcher of interest features |
Definition at line 187 of file modeler.hpp.
| jafar::modeler::Modeler::Modeler | ( | const std::string & | ply_mesh_file, |
| camera::CameraType | type, | ||
| const jblas::vec & | intrinsics | ||
| ) | [inline, protected] |
| ply_mesh_file | existing mesh to update saved in a ply file format |
| type | Camera type (see camera module) |
| intrinsics | Camera intrinsic parameters |
Definition at line 199 of file modeler.hpp.
References camera.
| jafar::modeler::Modeler::Modeler | ( | const std::string & | ply_mesh_file, |
| camera::CameraType | type, | ||
| const jblas::vec & | intrinsics, | ||
| fdetect_v2::Detector< Feature > * | _detector, | ||
| gfm_v2::Matcher< Feature > * | _matcher | ||
| ) | [inline, protected] |
the full package modeler for a single camera
| ply_mesh_file | existing mesh to update saved in a ply file format |
| type | Camera type (see camera module) |
| intrinsics | Camera intrinsic parameters |
| _detector | detector of interest features |
| _matcher | matcher of interest features |
Definition at line 217 of file modeler.hpp.
References camera.
| jafar::modeler::Modeler::Modeler | ( | const std::string & | ply_mesh_file, |
| fdetect_v2::Detector< Feature > * | _detector, | ||
| gfm_v2::Matcher< Feature > * | _matcher | ||
| ) | [inline, protected] |
the full package modeler with no camera
| ply_mesh_file | existing mesh to update saved in a ply file format |
| _detector | detector of interest features |
| _matcher | matcher of interest features |
Definition at line 234 of file modeler.hpp.
| jafar::modeler::Modeler::Modeler | ( | const std::string & | ply_mesh_file | ) | [inline, protected] |
| ply_mesh_file | existing mesh to update saved in a ply file format |
Definition at line 245 of file modeler.hpp.
| int jafar::modeler::Modeler::add | ( | const image::Image & | img, |
| geom::T3D * | pose | ||
| ) |
adds an image and a pose to the modeler and increments the counter img Image to process pose Camera frame when image was shot
| int jafar::modeler::Modeler::add | ( | camera::CameraType | type, |
| const jblas::vec & | intrinsics, | ||
| geom::T3D * | pose, | ||
| const image::Image & | img | ||
| ) |
adds a camera shot to the modeler and increments the counter img Image to process pose Camera frame when image was shot
| Generated on Wed Oct 15 2014 00:37:43 for Jafar by doxygen 1.7.6.1 |

|

