|
Jafar
|
|
Jafar
|
Definition at line 13 of file planeObserveModel.hpp.
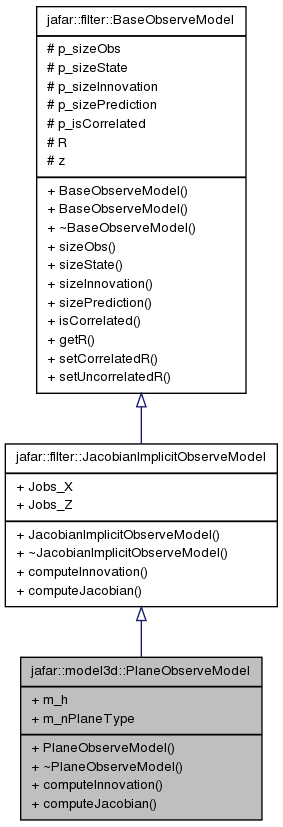
Public Member Functions | |
| PlaneObserveModel (std::size_t sizeObs_, std::size_t sizeState_) | |
| virtual jblas::vec const & | computeInnovation (const jblas::vec &x_, const jblas::vec &z_) |
| virtual void | computeJacobian (const jblas::vec &x_, const jblas::vec &z_) |
| call this method to compute the jacobian of the observation function with respect to X and Z | |
Public Attributes | |
| jblas::vec | m_h |
| int | m_nPlaneType |
| Equation du plan: | |
Equation du plan:
---------------- a x + b y + c z + d = 0 we suppose that one parameter is normalized (=1) :
type 0: x + abc[0]*y + abc[1]*z + abc[2] = 0 type 1: abc[0]*x + y + abc[1]*z + abc[2] = 0 type 2: abc[0]*x + abc[1]*y + z + abc[2] = 0
type 3: abc[0]*x + abc[1]*y + abc[2]*z + 1 = 0
type 4: Another form of plane equation : phi : angle with x-axis, 0 <= phi <= 360 deg theta : angle with z-axis, 0 <= theta <= 180 deg d0 : distance to the origine
cos(phi)sin(theta) x +sin(phi)sin(theta) y + cos(theta) z + d0 = 0
Definition at line 54 of file planeObserveModel.hpp.
| Generated on Wed Oct 15 2014 00:37:42 for Jafar by doxygen 1.7.6.1 |

|

