|
Jafar
|
|
Jafar
|
Definition at line 110 of file 3dOccupancyGrid.hpp.
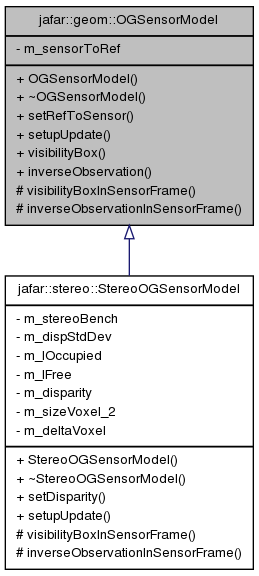
Public Member Functions | |
| void | setRefToSensor (jafar::geom::T3D const &refToSensor) |
| virtual void | setupUpdate (DenseOG const &og)=0 |
| Box< double > | visibilityBox () const |
| double | inverseObservation (VoxelCoord const &voxel) const |
| Return the probability for this voxel for beeing full. | |
Protected Member Functions | |
| virtual Box< double > | visibilityBoxInSensorFrame () const =0 |
| virtual double | inverseObservationInSensorFrame (VoxelCoord const &voxel) const =0 |
Private Attributes | |
| T3D * | m_sensorToRef |
| double jafar::geom::OGSensorModel::inverseObservation | ( | VoxelCoord const & | voxel | ) | const |
Return the probability for this voxel for beeing full.
The probability is returned in the log-odds ratio form. Here are the relations between l and p:
![\[ l = \log \frac{p}{1-p} \qquad p = 1-\frac{1}{1+ e^l} \]](form_16.png)
| Generated on Wed Oct 15 2014 00:37:36 for Jafar by doxygen 1.7.6.1 |

|

