|
Jafar
|
|
Jafar
|
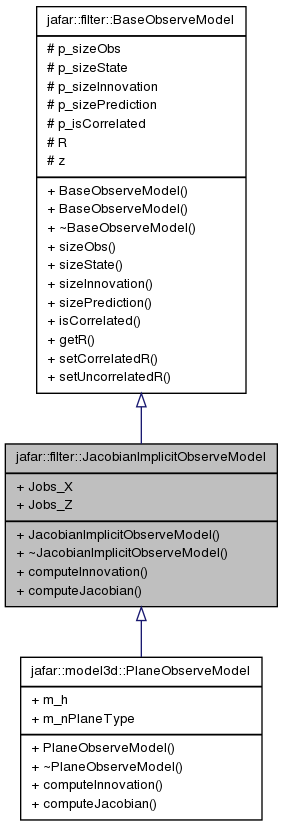
Non linear implicit observation model. More...
Non linear implicit observation model.
To define your own model you MUST derive this class. the observation model is of the type h(X,Z)=0 where h is not linear
Definition at line 154 of file observeModel.hpp.
#include <observeModel.hpp>
Public Member Functions | |
| JacobianImplicitObserveModel (std::size_t sizeObs_, std::size_t sizeState_, std::size_t functionCompenent) | |
| functionCompenent is the numer of compenent in the observation function | |
| virtual jblas::vec const & | computeInnovation (const jblas::vec &x_, const jblas::vec &z_)=0 |
| virtual void | computeJacobian (const jblas::vec &x_, const jblas::vec &z_)=0 |
| call this method to compute the jacobian of the observation function with respect to X and Z | |
Public Attributes | |
| jblas::mat | Jobs_X |
| Jacobian of the observe function with respect to the state X. | |
| jblas::mat | Jobs_Z |
| Jacobian of the observe function with respect to the measurement Z. | |
| jafar::filter::JacobianImplicitObserveModel::JacobianImplicitObserveModel | ( | std::size_t | sizeObs_, |
| std::size_t | sizeState_, | ||
| std::size_t | functionCompenent | ||
| ) |
functionCompenent is the numer of compenent in the observation function
example: if h(X,Z) has its value in R then functionCompenent=1 if h(X,Z) has its value in R² then functionCompenent=2 if h(X,Z) has its value in R³ then functionCompenent=3 etc..
Jacobian of the observe function with respect to the state X.
Definition at line 163 of file observeModel.hpp.
Jacobian of the observe function with respect to the measurement Z.
Definition at line 170 of file observeModel.hpp.
| Generated on Wed Oct 15 2014 00:37:36 for Jafar by doxygen 1.7.6.1 |

|

