|
Jafar
|
|
Jafar
|
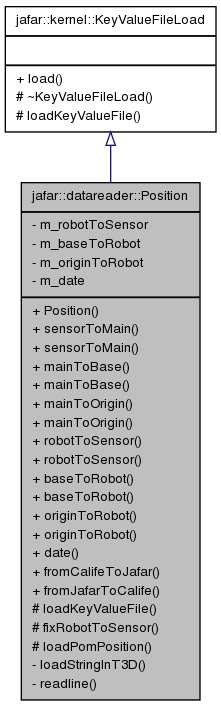
Class Position holds the different available T3D transforms of a pos file. More...
Class Position holds the different available T3D transforms of a pos file.
Definition at line 111 of file PositionReader.hpp.
#include <PositionReader.hpp>
Public Member Functions | |
| void | sensorToMain (jafar::geom::T3D &pos) |
| /!\ Deprecated, returns robotToSensor according to Jafar convention, use robotToSensor instead | |
| jafar::geom::T3D * | sensorToMain () |
| /!\ Deprecated, returns robotToSensor according to Jafar convention, use robotToSensor instead | |
| void | mainToBase (jafar::geom::T3D &pos) |
| /!\ Deprecated, returns baseToRobot according to Jafar convention, use baseToRobot instead | |
| jafar::geom::T3D * | mainToBase () |
| /!\ Deprecated, returns baseToRobot according to Jafar convention, use baseToRobot instead | |
| void | mainToOrigin (jafar::geom::T3D &pos) |
| /!\ Deprecated, returns originToRobot according to Jafar convention, use originToRobot instead | |
| jafar::geom::T3D * | mainToOrigin () |
| /!\ Deprecated, returns originToRobot according to Jafar convention, use originToRobot instead | |
| void | robotToSensor (jafar::geom::T3D &pos) |
| Returns robotToSensor transformation (named sensorToMain in .pos files according to Genom naming convention) | |
| jafar::geom::T3D * | robotToSensor () |
| Returns robotToSensor transformation (named sensorToMain in .pos files according to Genom naming convention) | |
| void | baseToRobot (jafar::geom::T3D &pos) |
| Returns baseToRobot transformation (named mainToBase in .pos files according to Genom naming convention) | |
| jafar::geom::T3D * | baseToRobot () |
| Returns baseToRobot transformation (named mainToBase in .pos files according to Genom naming convention) | |
| void | originToRobot (jafar::geom::T3D &pos) |
| Returns originToRobot transformation (named mainToOrigin in .pos files according to Genom naming convention) | |
| jafar::geom::T3D * | originToRobot () |
| Returns originToRobot transformation (named mainToOrigin in .pos files according to Genom naming convention) | |
| int | date () |
| returns the date of the position | |
Static Public Member Functions | |
| static void | fromCalifeToJafar (const jblas::vec src, jblas::vec &dst) |
| converts a T3D vector from Calife format to Jafar format | |
| static void | fromJafarToCalife (const jblas::vec src, jblas::vec &dst) |
| converts a T3D vector from Jafar format to Calife format | |
Protected Member Functions | |
| virtual void | loadKeyValueFile (jafar::kernel::KeyValueFile const &keyValueFile) |
| load data from a KeyValueFile | |
| void | fixRobotToSensor (const jblas::vec &robotToSensorCorrection) |
| apply a correction to robotToSensor | |
| bool | loadPomPosition (std::string filename) |
| load data from a POM .pos file, returns false if not a POM .pos file | |
Private Member Functions | |
| void | loadStringInT3D (const std::string &, jafar::geom::T3D &pos) |
| bool | readline (std::string &line, char *sep, int index, int len, jblas::vec &res) |
Private Attributes | |
| jblas::vec | m_robotToSensor |
| jblas::vec | m_baseToRobot |
| jblas::vec | m_originToRobot |
| int | m_date |
Friends | |
| Position | PositionReader::loadPosition (unsigned int index_, PositionReader::PosFileType fileType) const |
| void | PositionReader::loadPosition (unsigned int index_, Position &pos) const |
| Generated on Wed Oct 15 2014 00:37:33 for Jafar by doxygen 1.7.6.1 |

|

