|
Jafar
|
|
Jafar
|
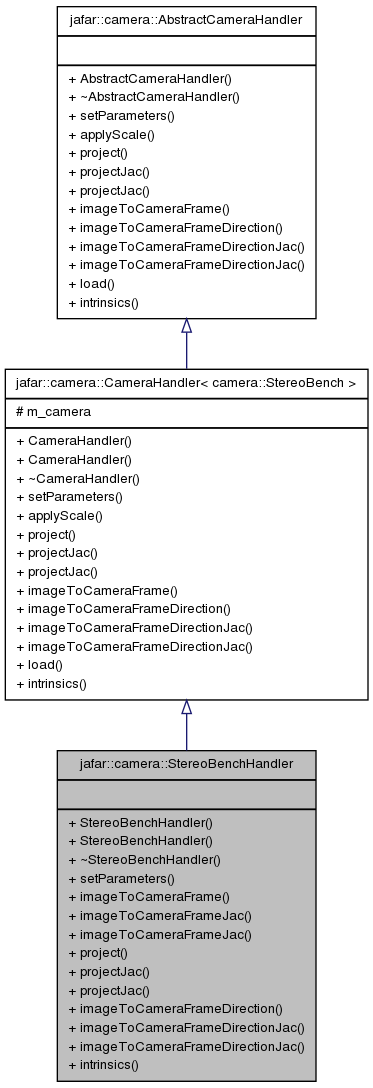
Class StereoBenchHandler handles StereoBench WARNING project and imageToCameraFrame methodes uses left camera. More...
Class StereoBenchHandler handles StereoBench WARNING project and imageToCameraFrame methodes uses left camera.
Definition at line 171 of file cameraHandler.hpp.
#include <cameraHandler.hpp>
Public Member Functions | |
| StereoBenchHandler (const camera::StereoBench &_camera) | |
| void | setParameters (const jblas::vec ¶ms) |
| sets camera parameters | |
| void | imageToCameraFrame (const jblas::vec2 &pixel, const double &disparity, jblas::vec3 &position) |
| void | imageToCameraFrameJac (const jblas::vec2 &pixel, const double &disparity, jblas::mat &J) |
| void | imageToCameraFrameJac (const jblas::vec2 &pixel, const double &disparity, jblas::vec3 &position, jblas::mat &J) |
| bool | project (const jblas::vec3 &v, jblas::vec2 &pix) |
| projects a point into a pixel | |
| void | projectJac (const jblas::vec3 &v, jblas::mat &J) |
| returns jacaobian of point projection | |
| void | projectJac (const jblas::vec3 &v, jblas::vec2 &pix, jblas::mat &J) |
| returns projection and its jacaobian of a point | |
| void | imageToCameraFrameDirection (const jblas::vec2 &pixel, jblas::vec3 &direction) |
| returns jacobian of pixel direction in camera frame | |
| void | imageToCameraFrameDirectionJac (const jblas::vec2 &pixel, jblas::mat &J) |
| returns pixel direction's jacobian in camera frame | |
| void | imageToCameraFrameDirectionJac (const jblas::vec2 &pixel, jblas::vec3 &direction, jblas::mat &J) |
| returns pixel direction and its jacobian in camera frame | |
| void | intrinsics (jblas::mat33 &intrinsic) |
| returns pinhole intrinsics | |
| Generated on Wed Oct 15 2014 00:37:33 for Jafar by doxygen 1.7.6.1 |

|

