|
Jafar
|
|
Jafar
|
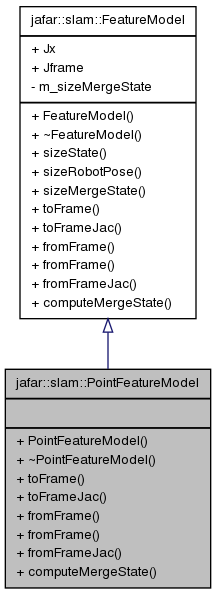
Sizeless 3D point model. More...
Sizeless 3D point model.
Definition at line 23 of file pointFeature.hpp.
#include <pointFeature.hpp>
Public Member Functions | |
| void | toFrame (jblas::vec const &frame_, jblas::vec const &x_, jblas::vec &xRes) |
| Computes the feature state x in frame_ , the result is stored in xRes. | |
| void | toFrameJac (const jblas::vec &frame_, const jblas::vec &x_) |
| Computes the jacobian of toFrame(). | |
| void | fromFrame (jblas::vec const &frame_, jblas::vec const &x_, jblas::vec &xRes) |
| Computes the feature state x expressed in frame_ in the frame of reference, the result is stored in xRes. | |
| void | fromFrame (jblas::vec const &frame_, jblas::vec const &x_, jblas::vec_range &xRes) |
| void | fromFrameJac (const jblas::vec &frame_, const jblas::vec &x_) |
| Computes the jacobian of fromFrame(). | |
| void | computeMergeState (const jblas::vec &x_, jblas::vec &mergeX_, jblas::mat &jac) |
| Function to apply contraints over features (this function is only implemented for segment features) | |
| void jafar::slam::PointFeatureModel::fromFrame | ( | jblas::vec const & | frame_, |
| jblas::vec const & | x_, | ||
| jblas::vec_range & | xRes | ||
| ) | [virtual] |
Implements jafar::slam::FeatureModel.
| Generated on Wed Oct 15 2014 00:37:49 for Jafar by doxygen 1.7.6.1 |

|

