|
Jafar
|
|
Jafar
|
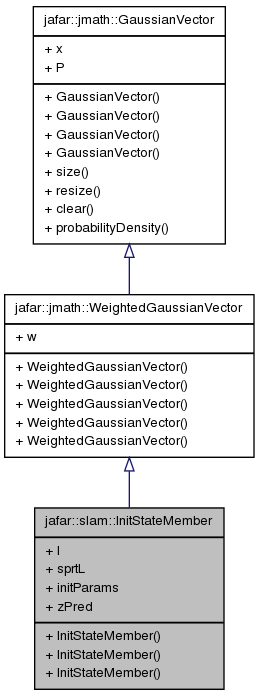
Initial state gaussian member (or hypothesis). More...
Initial state gaussian member (or hypothesis).
Definition at line 29 of file bearingOnlyFeature.hpp.
#include <bearingOnlyFeature.hpp>
Public Member Functions | |
| InitStateMember (const jblas::vec &x_, const jblas::sym_mat &P_, double w_, std::size_t sizeObs) | |
| InitStateMember (const jblas::vec &x_, const jblas::sym_mat &P_, double w_, jafar::jmath::GaussianVector const ¶m1, std::size_t sizeObs) | |
| InitStateMember (const jblas::vec &x_, const jblas::sym_mat &P_, double w_, jafar::jmath::GaussianVector const ¶m1, jafar::jmath::GaussianVector const ¶m2, std::size_t sizeObs) | |
Public Attributes | |
| double | l |
| likelihood of last observation | |
| double | sprtL |
| SPRT accumulated log-likelihood ratio. | |
|
std::vector < jafar::jmath::GaussianVector > | initParams |
| jafar::jmath::GaussianVector | zPred |
| Generated on Wed Oct 15 2014 00:37:48 for Jafar by doxygen 1.7.6.1 |

|

