|
Jafar
|
|
Jafar
|
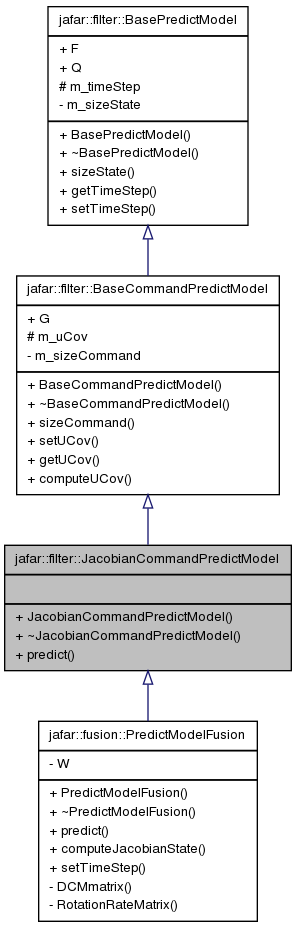
General non linear predict model with an input command. More...
General non linear predict model with an input command.
Definition at line 180 of file predictModel.hpp.
#include <predictModel.hpp>
Public Member Functions | |
| JacobianCommandPredictModel (std::size_t sizeState, std::size_t sizeCommand) | |
| virtual void | predict (jblas::vec &x, jblas::vec const &u_)=0 |
| prediction function. | |
| virtual void jafar::filter::JacobianCommandPredictModel::predict | ( | jblas::vec & | x, |
| jblas::vec const & | u_ | ||
| ) | [pure virtual] |
prediction function.
predict() implementation should look like:
void MyPredictModel::predict(jblas::vec& x, jblas::vec const& u_) { // compute jacobian aroud x_t, store it in F // compute jacobian aroud u_, store it in G // compute Q if relevant // compute x_t+1 function of x_t and u_ // store result in x }
Implemented in jafar::fusion::PredictModelFusion.
| Generated on Wed Oct 15 2014 00:37:36 for Jafar by doxygen 1.7.6.1 |

|

