|
Jafar
|
|
Jafar
|
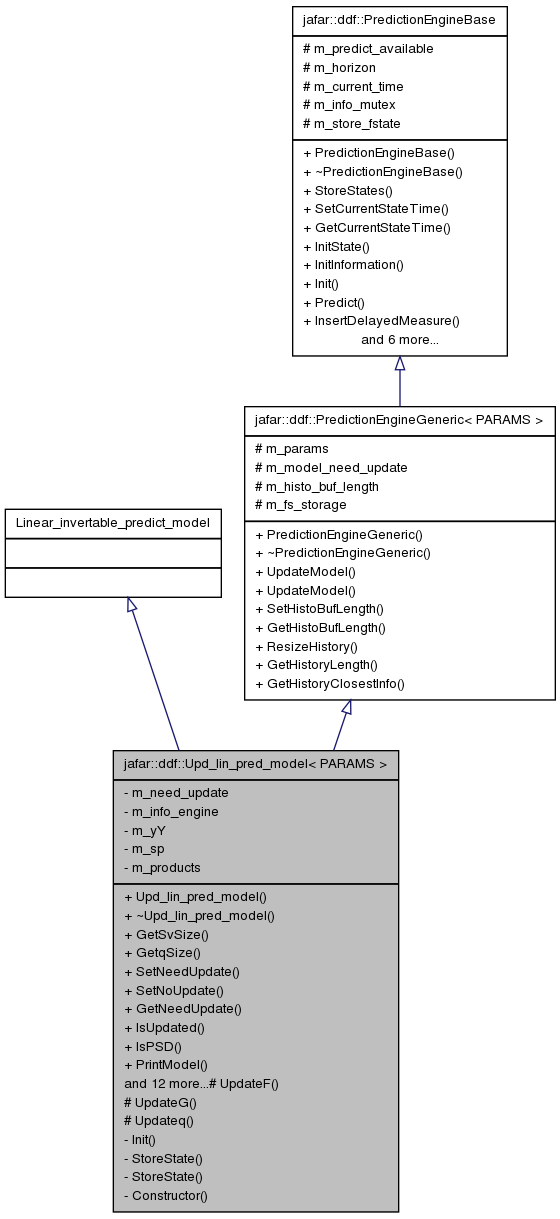
This class derives from a Linear_invertable_predict_model such as x(k|k-1) = F(x(k-1|k-1)) + G(k)w(k) q(k) = state noise covariance, q(k) is covariance of w(k) G(k) = state noise coupling invF exists and PredictionEngineBase. More...
This class derives from a Linear_invertable_predict_model such as x(k|k-1) = F(x(k-1|k-1)) + G(k)w(k) q(k) = state noise covariance, q(k) is covariance of w(k) G(k) = state noise coupling invF exists and PredictionEngineBase.
This class provides functions for updating the prediction model (matrices such as Fk, Gk and q) and for predicting from k to k+1. This class cannot be copied
Definition at line 34 of file upd_lin_pred.hpp.
#include <upd_lin_pred.hpp>
Public Member Functions | |
| Upd_lin_pred_model (unsigned short sv_size, unsigned short q_size) | |
| unsigned short | GetSvSize () |
| unsigned short | GetqSize () |
| void | SetNeedUpdate (NEED_UPD_TYPE what, bool needUpd) |
| void | SetNoUpdate () |
| std::vector< bool > const & | GetNeedUpdate () const |
| bool | IsUpdated (NEED_UPD_TYPE what) |
| bool | IsPSD (bool use_mutex) |
| Check if X or Y is PD. | |
| void | PrintModel () |
| void | Predict (time const &horizon) |
| Predict state from k to k+1. | |
| void | Init (InfoContainer const &inityY) |
| void | InitState (VEC const &x, MSYM const &X) |
| Set the state vector and the covariance matrix (at time k) before calling Predict. | |
| void | InitInformation (VEC const &y, MSYM const &Y) |
| Set the information vector and information matrix (at time k) before calling Predict. | |
| InfoContainer const & | GetPrediction () |
| Get the predicted state (k+1) the result of Predict (return x,X in the case of Kalman and y,Y in the case of information) | |
| InfoContainer const & | GetInversePrediction () |
| Return the inverse of GetPrediction. | |
| void | UpdatePredictionWith (InfoContainer const &info) |
| In the case of an information filter the update is trivial (it is just a sum) | |
| void | UpdateModel () |
| void | PrintHistory () |
| FSStorageBase< PARAMS > const & | RecallStoredState (unsigned int idx) const |
| void | ClearHistory () |
| unsigned short | GetHistorySize () const |
| bool | InsertDelayedMeasure (InfoContainer const &ICont, time const &avail_time) |
| Insert a measure that has been taken in the past (teturn true in case of success) | |
Protected Member Functions | |
| virtual void | UpdateF (PARAMS ¶m)=0 |
| virtual void | UpdateG (PARAMS ¶m)=0 |
| virtual void | Updateq (PARAMS ¶m)=0 |
Private Member Functions | |
| void | Init () |
| void | StoreState (FS_STORE_TYPE fs_type) |
| void | StoreState (MSYM const &I, VEC const &i) |
| void | Constructor () |
Private Attributes | |
| std::vector< bool > | m_need_update |
| Bayesian_filter::Information_scheme | m_info_engine |
| InfoContainer | m_yY |
| SpeedUpInfoStruct | m_sp |
| Bayesian_filter::Information_scheme::Linear_predict_byproducts | m_products |
| Generated on Wed Oct 15 2014 00:37:33 for Jafar by doxygen 1.7.6.1 |

|

