Definition at line 56 of file main.hpp.
Public Member Functions |
|
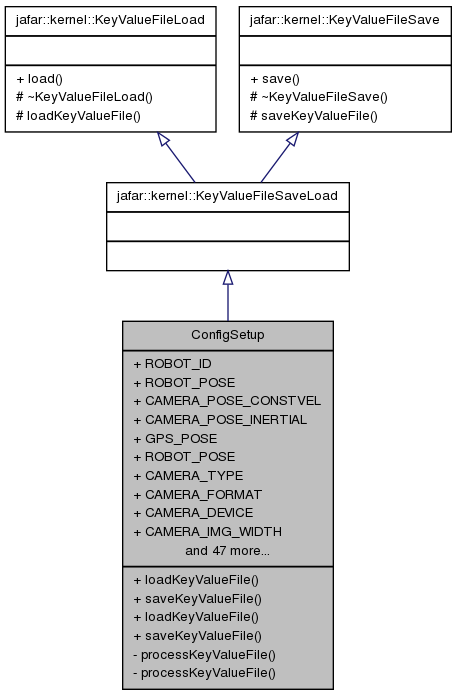
virtual void | loadKeyValueFile (jafar::kernel::KeyValueFile const &keyValueFile) |
| | Implement this method calling repeatedly KeyValueFile::getItem() method.
|
|
virtual void | saveKeyValueFile (jafar::kernel::KeyValueFile &keyValueFile) |
| | Implement this method calling repeatedly KeyValueFile::setItem() method.
|
|
virtual void | loadKeyValueFile (jafar::kernel::KeyValueFile const &keyValueFile) |
| | Implement this method calling repeatedly KeyValueFile::getItem() method.
|
|
virtual void | saveKeyValueFile (jafar::kernel::KeyValueFile &keyValueFile) |
| | Implement this method calling repeatedly KeyValueFile::setItem() method.
|
Public Attributes |
|
unsigned | ROBOT_ID |
| | Should be unique between the robots of the same team.
|
|
jblas::vec6 | ROBOT_POSE |
| | Initial robot position.
|
| jblas::vec | CAMERA_POSE_CONSTVEL [2] |
| | SENSOR.
|
|
jblas::vec | CAMERA_POSE_INERTIAL [2] |
| | camera pose in SLAM frame (IMU frame) for inertial (x,y,z,roll,pitch,yaw) (m,deg). If add std devs, will be filtered.
|
|
jblas::vec | GPS_POSE |
| | GPS pose in SLAM frame (IMU frame in inertial) (x,y,z,roll,pitch,yaw) (m,deg). If add std devs, will be filtered.
|
|
jblas::vec | ROBOT_POSE |
| | real robot pose in SLAM frame (IMU frame in inertial) (for init and export)
|
|
unsigned | CAMERA_TYPE [2] |
| | camera type (0 = firewire, 1 = firewire format7, 2 = USB, 3 = UEYE)
|
|
unsigned | CAMERA_FORMAT [2] |
| | camera image format (0: GRAY8, 10: RGB24, 20: YUV411, 21: YUV422_UYVY, 22: YUV422_YUYV, 23: YUV422_YYUV, 24: YVU422_VYUY, 25: YVU422_YVYU, 26: YUV444, 30: BAYER_BGGR, 31: BAYER_GRBG, 32: BAYER_RGGB, 33: BAYER_GBRG)
|
|
std::string | CAMERA_DEVICE [2] |
| | camera device (firewire ID or device)
|
|
unsigned | CAMERA_IMG_WIDTH [2] |
| | image width
|
|
unsigned | CAMERA_IMG_HEIGHT [2] |
| | image height
|
|
jblas::vec4 | CAMERA_INTRINSIC [2] |
| | intrisic calibration parameters (u0,v0,alphaU,alphaV)
|
|
jblas::vec3 | CAMERA_DISTORTION [2] |
| | distortion calibration parameters (r1,r2,r3)
|
|
std::string | CAMERA_CALIB [2] |
| | calibration file if need to rectify
|
|
unsigned | CAMERA_IMG_WIDTH_SIMU [2] |
| | SIMU SENSOR.
|
|
unsigned | CAMERA_IMG_HEIGHT_SIMU [2] |
|
jblas::vec4 | CAMERA_INTRINSIC_SIMU [2] |
|
jblas::vec3 | CAMERA_DISTORTION_SIMU [2] |
| double | UNCERT_VLIN |
| | CONSTANT VELOCITY.
|
|
double | UNCERT_VANG |
| | initial uncertainty stdev on angular velocity (rad/s)
|
|
double | PERT_VLIN |
| | perturbation on linear velocity, ie non-constantness (m/s per sqrt(s))
|
|
double | PERT_VANG |
| | perturbation on angular velocity, ie non-constantness (rad/s per sqrt(s))
|
| std::string | MTI_DEVICE |
| | INERTIAL (also using UNCERT_VLIN)
|
|
double | ACCELERO_FULLSCALE |
| | full scale of accelerometers (m/s2) (MTI: 17)
|
|
double | ACCELERO_NOISE |
| | noise stdev of accelerometers (m/s2) (MTI: 0.002*sqrt(30) )
|
|
double | GYRO_FULLSCALE |
| | full scale of gyrometers (rad/s) (MTI: rad(300) )
|
|
double | GYRO_NOISE |
| | noise stdev of gyrometers (rad/s) (MTI: rad(0.05)*sqrt(40) )
|
|
double | INITIAL_GRAVITY |
| | initial value of gravity (default value 9.806, m/s2)
|
|
double | UNCERT_GRAVITY |
| | initial gravity uncertainty (% of INITIAL_GRAVITY)
|
|
double | UNCERT_ABIAS |
| | initial accelerometer bias uncertainty (% of ACCELERO_FULLSCALE, m/s2)
|
|
double | UNCERT_WBIAS |
| | initial gyrometer bias uncertainty (% of GYRO_FULLSCALE, rad/s)
|
|
double | PERT_AERR |
| | noise stdev coeff of accelerometers, for testing purpose (% of ACCELERO_NOISE)
|
|
double | PERT_WERR |
| | noise stdev coeff of gyrometers, for testing purpose (% of GYRO_NOISE)
|
|
double | PERT_RANWALKACC |
| | IMU a_bias random walk (m/s2 per sqrt(s))
|
|
double | PERT_RANWALKGYRO |
| | IMU w_bias random walk (rad/s per sqrt(s))
|
|
double | INITIAL_HEADING |
| | initial heading of the real robot (0 is east, positive is toward north, rad)
|
|
double | UNCERT_HEADING |
| | initial heading uncertainty of the real robot (rad)
|
|
double | UNCERT_ATTITUDE |
| | initial attitude angles uncertainty (rad)
|
|
double | IMU_TIMESTAMP_CORRECTION |
| | correction to add to the IMU timestamp for synchronization (s)
|
|
double | GPS_TIMESTAMP_CORRECTION |
| | correction to add to the GPS timestamp for synchronization (s)
|
| double | dxNDR |
| | Odometry noise variance to distance ratios.
|
|
double | dvNDR |
| | Odometry noise in orientation increment (rad per sqrt(m))
|
|
double | ODO_TIMESTAMP_CORRECTION |
| | correction to add to the odometry timestamp for synchronization (s)
|
|
jblas::vec4 | ODO_CALIB |
| | multiplicative correction for odometry wheel size (lf, rf, lb, rb)
|
|
double | GPS_MAX_CONSIST_SIG |
| | max sigma with guaranteed consistency (reflections can cause inconsistency)
|
|
double | SIMU_IMU_TIMESTAMP_CORRECTION |
| | SIMU INERTIAL.
|
|
double | SIMU_IMU_FREQ |
|
double | SIMU_IMU_GRAVITY |
|
double | SIMU_IMU_GYR_BIAS |
|
double | SIMU_IMU_GYR_BIAS_NOISESTD |
|
double | SIMU_IMU_GYR_GAIN |
|
double | SIMU_IMU_GYR_GAIN_NOISESTD |
|
double | SIMU_IMU_RANDWALKGYR_FACTOR |
|
double | SIMU_IMU_ACC_BIAS |
|
double | SIMU_IMU_ACC_BIAS_NOISESTD |
|
double | SIMU_IMU_ACC_GAIN |
|
double | SIMU_IMU_ACC_GAIN_NOISESTD |
|
double | SIMU_IMU_RANDWALKACC_FACTOR |
Private Member Functions |
|
void | processKeyValueFile (jafar::kernel::KeyValueFile &keyValueFile, bool read) |
|
void | processKeyValueFile (jafar::kernel::KeyValueFile &keyValueFile, bool read) |